Autonomous Robot Evolution Lab
University of York
Evolvable and autonomous fabrication of robots

What you will see during our demonstration is both simulated and real robots in action. Artificial evolution will create new robot bodies, including organs (e.g. wheels, legs, sensors) and where on the body these organs should go. You will see examples of this in simulation and then on real robots. Example of robot fabrication will be shown, how bodies are formed and how robots are built autonomously. We will discuss how the robot’s brain can be created and then how the brain learns. Finally, the demonstration will show example of these artificially evolved robots operating in a real environment.
Meet the Team
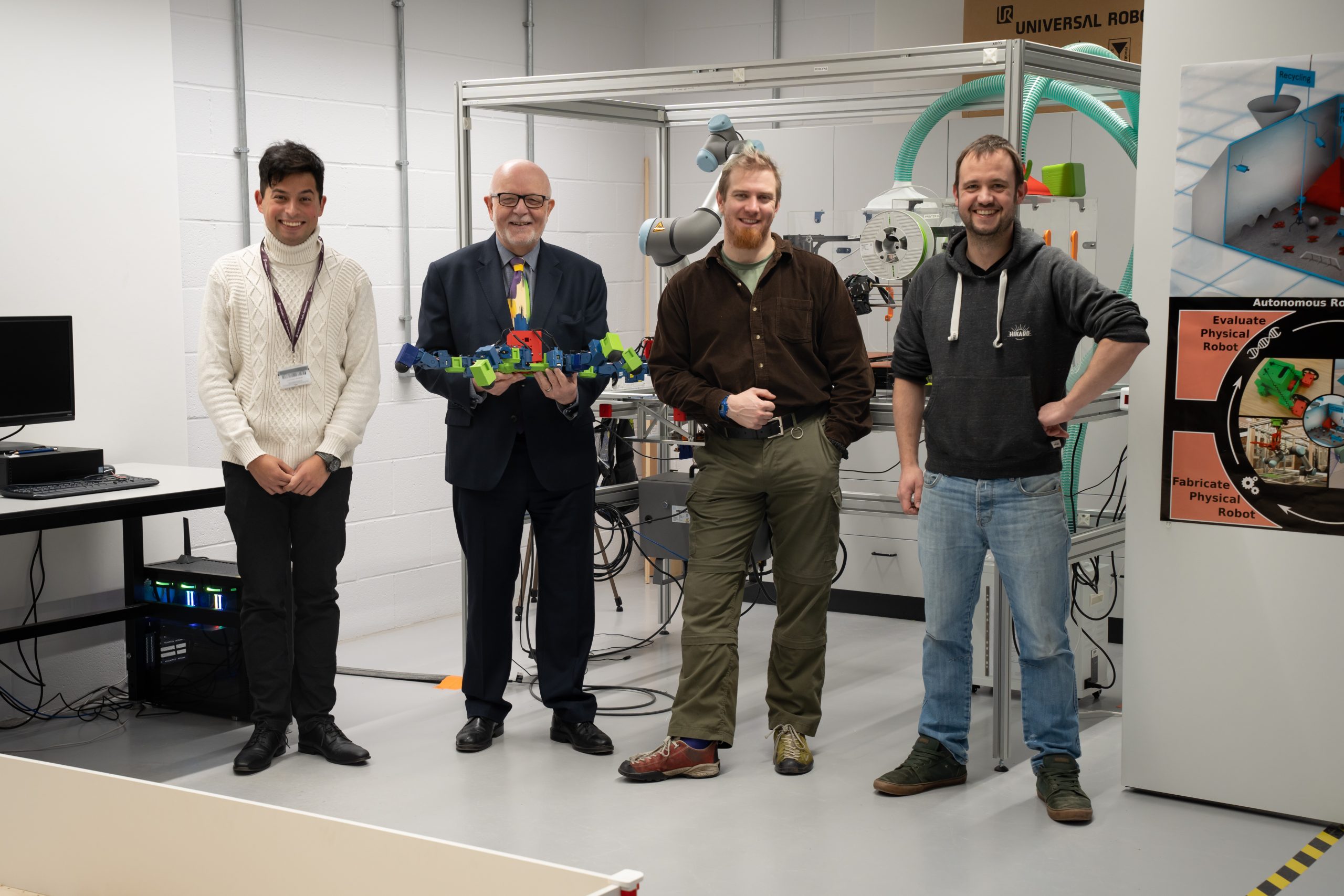
In the Autonomous Robot Evolution (ARE) lab we aim to design, construct and operate robots inspired by biology. Edgar Buchanan is a Researcher working on simulation environments and running real robot experiments. Andy Tyrrell is an academic in the School of Physics, Engineering and Technology and spends some of his week at the Institute for Safe Autonomy. He is group leader of the Intelligent Systems & Robotics group with particular interest into bio-inspired architectures and systems, a major part of the ARE research. Rob Woolley was a PhD student and Researcher in the ARE research area. Rob has worked on the design of a Robot Fabricator (RoboFab) and various hardware aspects for evolving robots. James Hilder is chief technical officer in the Institute for Safe Autonomy at the University of York. He looks after all the technical facilities in the Institute in particular the many and varied robot systems.
![]()
![]()